A Cserépfedés Automatizált Építésének Problémaelemzése
Az elmúlt évtizedek során a robotok a legtöbb iparág kulcsfontosságú szereplőivé váltak, de építéstechnológiai alkalmazásuk máig kísérleti jellegű. Belátható azonban, hogy e területen is létezik jónéhány olyan munkafolyamat, melyek automatizálása nagymértékben növelhetné a hatékonyságot, illetve a biztonságot. Minden magasban végzett tevékenység kiemelt baleseti kockázattal jár, amit a körülményesnek tartott munkavédelmi előírások gyakori be nem tartása csak tovább fokoz. További gond az egyre súlyosbodó szakemberhiány, melynek velejárójaként néha képzetlen személyekkel is végeztetnek ilyen jellegű munkát.
A kutatás témája egy tetőhéjalás-automatizálási kísérletsorozat. Mivel kevés a hasonló feladatot feldolgozó szakirodalom, jelen dolgozat a témát a legáltalánosabb peremfeltételek mentén vizsgálja.
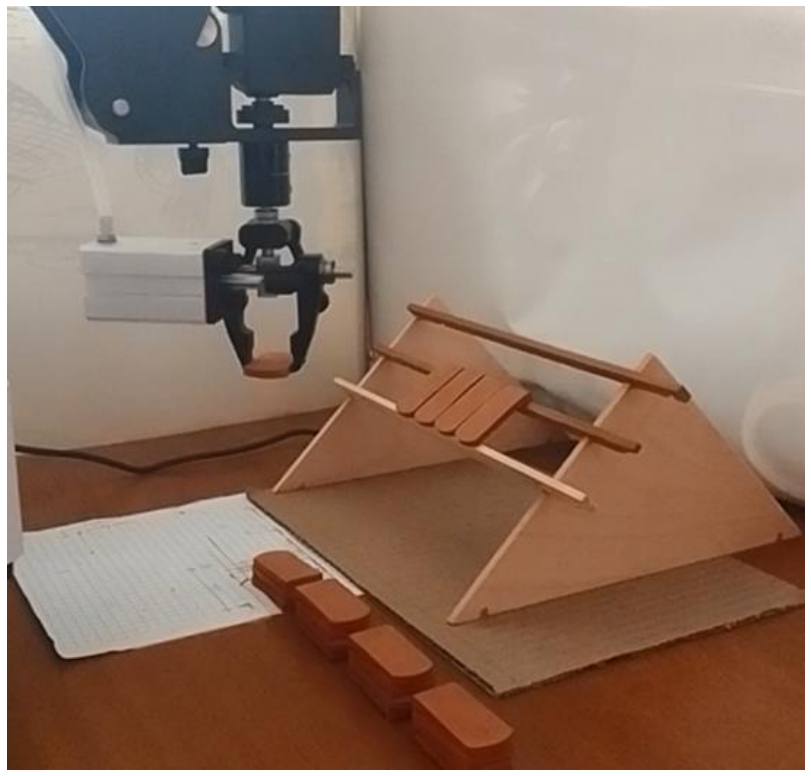
A feladat egyszerű nyeregtető általános felületen síkcserepekkel való lefedésének robotkarral való építési és anyagellátási problémkörét vizsgálja modell környezetben. Mivel a kiegészítő elemek (pl. gerinc-és szegélycserepek) automatizált elhelyezése csak az alapelemekre vonatkozó átfogó elemzések után, a fejlődési folyamat egy további szakaszában időszerű, ezért ezek itt nem képezik vizsgálat tárgyát.
A automatizált feladatokhoz DobotMagician sínnel ellátott asztali robotkart, valamint a hozzá fejlesztett programozási környezet alkalmazunk. A kutatás célja minél több, a valós építés során bizonyosan felmerülő, laboratóriumi körülmények közt is elfogadhatóan modellezhető kérdés vizsgálata, mint például az elemek raklapozási és megfogási módja, vagy a ferde tetősíkhoz történő zökkenőmentes illesztés.